Code based relative positioning in kinematic mode using double difference observations.
The GPS constellation consists of 24 earth orbiting satellites, in 6 orbital planes. GPS receivers receive signals from the satellites (at least 4 are needed) and use these signals to determine their location. See the References page for more information about the details of how GPS works.
Double Difference (DD) Formation : Generation of pseudorange (code) DDs is key to determining the baseline vector between the reference station and the rover station antennas. In order to do so the satellite ephemeredes must be properly manipulated to ensure that the code measurements at two receiver locations are adjusted to a common measurement time base with respect to GPS time. Formation of the DD offers tremendous advantage because of the ultimate cancellation of teh receiver and the satellite clock biases as well as most of the ionospheric propagation delay. If the two antennas are located at the same altitude the tropospheric propagation delay will largely be cancelled as well.
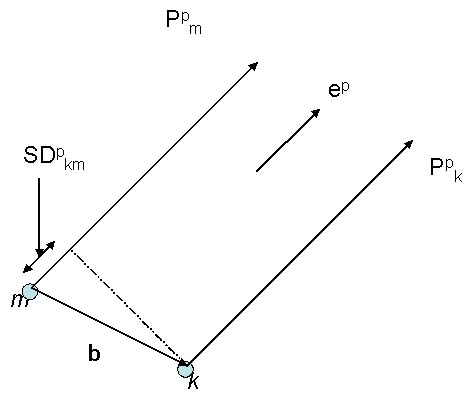
The figure shown below depicts two simple GPS receiver interacting with a single
satellite. The phase centers of the two antennas are located at k and m, and
b
represents the unknown baseline between them. The satellite p is at a mean
distance of 20,200 km and we assume the paths of propagation between the
satellite and the two antenna are parallel. The range between the satellite p and
k ( ![]() ) or
satellite p and m (
) or
satellite p and m (
![]() ).
).
The equations for these pseudoranges are given as follows.
![]()
![]()
Where:
P is the receiver measured pseudorange
k, m refer to the receiver/receiver antenna phase centers
p is the satellite signal source
R is the True Range
Q is the noise due to all sources (e.g. receiver, multipath)
![]() is associated
satellite or receiver clock bias
is associated
satellite or receiver clock bias
![]() represents the group
delay due to the ionosphere
represents the group
delay due to the ionosphere
![]() represents the delay
due to the troposphere
represents the delay
due to the troposphere
Writing out the double difference equations:
![]()
![]()
![]()
![]()
It should be noted that the satellite clock bias and
the receiver clock bias is cancelled in the double differencing. Also if we
work with relatively small base line the ionospheric and the tropospheric
delay are cancelled.
Referring to the figure above, it is evident that the projection of b
onto the line of sight vector between p and m can be written as the dot
product of b with a unit vector ep . This projection
is actually the single difference
![]() . So writing out
these equations we get.
. So writing out
these equations we get.
![]()
![]()
![]()
Using these equations we form the following set of equations using a total of 4 satellites and solve them in order to obtain the baseline components.
DD=Hb
Solving the above equations yield the Baseline components.
Now is one of the two stations is an established and surveyed location then by using the computed baseline components we can find the position of the other unknown station to a reasonable accuracy.
These baseline vectors that is calculated at every time interval. Now the difference in the baseline vectors could get us the velocity information for the rover station.